A more detailed introduction#
The following notebook expands a bit on the “Getting started” one.
[1]:
import jax
import sbijax
%matplotlib inline
import matplotlib.pyplot as plt
[2]:
import matplotlib.pyplot as plt
def plot_posterior_hist(samples, key="theta", bins=40):
theta = samples[key].reshape(-1, samples[key].shape[-1])
d = theta.shape[-1]
fig, axes = plt.subplots(1, d, figsize=(3 * d, 3))
axes = [axes] if d == 1 else list(axes)
for i, ax in enumerate(axes):
ax.hist(theta[:, i], bins=bins, color="#700e01")
ax.set_title(f"{key}[{i}]")
fig.tight_layout(); return fig
Model definition#
To do approximate inference using sbijax, a user first has to define a prior model and a simulator function which can be used to generate synthetic data. We will be using a simple bivariate Gaussian as an example with the following generative model:
\begin{align} \mu &\sim \mathcal{N}_2(0, I)\\ \sigma &\sim \mathcal{N}^+(1)\\ y & \sim \mathcal{N}_2(\mu, \sigma^2 I) \end{align}
Using TensorFlow Probability, the prior model and simulator are implemented like this:
[3]:
from jax import numpy as jnp, random as jr
from tensorflow_probability.substrates.jax import distributions as tfd
def prior_fn():
prior = tfd.JointDistributionNamed(dict(
mean=tfd.Normal(jnp.zeros(2), 1.0),
scale=tfd.HalfNormal(jnp.ones(1)),
), batch_ndims=0)
return prior
def simulator_fn(seed: jr.PRNGKey, theta: dict[str, jax.Array]):
p = tfd.Normal(jnp.zeros_like(theta["mean"]), 1.0)
y = theta["mean"] + theta["scale"] * p.sample(seed=seed)
return y
[4]:
prior = prior_fn()
theta = prior.sample(seed=jr.PRNGKey(0), sample_shape=())
theta
[4]:
{'scale': Array([0.47995827], dtype=float32),
'mean': Array([0.62157685, 0.8429717 ], dtype=float32)}
[5]:
prior.log_prob(theta)
[5]:
Array(-2.7273278, dtype=float32)
[6]:
simulator_fn(seed=jr.PRNGKey(1), theta=theta)
[6]:
Array([0.54745346, 0.88362765], dtype=float32)
[7]:
theta = prior.sample(seed=jr.PRNGKey(2), sample_shape=(2,))
theta
[7]:
{'scale': Array([[0.48404777],
[0.3731677 ]], dtype=float32),
'mean': Array([[ 1.2550716 , 0.27969918],
[-0.66132253, -0.79632473]], dtype=float32)}
[8]:
prior.log_prob(theta)
[8]:
Array([-3.0075376, -2.6690357], dtype=float32)
[9]:
simulator_fn(seed=jr.PRNGKey(3), theta=theta)
[9]:
Array([[ 0.5550142 , 1.0248331 ],
[-0.51858354, -0.0609225 ]], dtype=float32)
Algorithm definition#
Having defined a model of interest, i.e., the prior and simulator functions, we construct an inferential method. We can use a pre-implemented method to construct a normalizing flow, but for the sake of demonstration we implement a MAF from scratch.
[10]:
import haiku as hk
import surjectors
import surjectors.nn
import surjectors.util
from sbijax import nle
[11]:
n_dim_data = 2
n_layers, hidden_sizes = 5, (64, 64)
[12]:
def make_custom_affine_maf(n_dimension, n_layers, hidden_sizes):
def _bijector_fn(params):
means, log_scales = surjectors.util.unstack(params, -1)
return surjectors.ScalarAffine(means, jnp.exp(log_scales))
def _flow(method, **kwargs):
layers = []
order = jnp.arange(n_dimension)
for _ in range(5):
layer = surjectors.MaskedAutoregressive(
bijector_fn=_bijector_fn,
conditioner=surjectors.nn.MADE(
n_dimension,
list(hidden_sizes),
2,
w_init=hk.initializers.TruncatedNormal(0.001),
b_init=jnp.zeros,
),
)
order = order[::-1]
layers.append(layer)
layers.append(surjectors.Permutation(order, 1))
chain = surjectors.Chain(layers[:-1])
base_distribution = tfd.Independent(
tfd.Normal(jnp.zeros(n_dimension), jnp.ones(n_dimension)),
1,
)
td = surjectors.TransformedDistribution(base_distribution, chain)
return td(method, **kwargs)
td = hk.transform(_flow)
return td
[13]:
neural_network = make_custom_affine_maf(n_dim_data, n_layers, hidden_sizes)
model = nle(prior, neural_network)
Training and Inference#
Inference is then as easy as simulating some data, fitting the data to the model, a sampling from the approximate posterior. The data set is a dictionary of dictionaries (a PyTree in JAX lingo). It contains samples for the simulator function, called y, and parameter samples from the prior model, called theta.
[14]:
from sbijax import simulate
data = simulate(
jr.PRNGKey(1),
prior,
simulator_fn,
n=10_000,
)
data
[14]:
{'y': Array([[ 0.07692909, 0.7882271 ],
[-1.2418504 , -0.25333643],
[ 1.1943562 , -2.124853 ],
...,
[ 1.3316323 , 0.5488601 ],
[ 4.862982 , -4.1227694 ],
[-0.00955033, 0.989019 ]], dtype=float32),
'theta': {'scale': Array([[0.9232396 ],
[0.36471593],
[0.6795394 ],
...,
[0.11454558],
[1.260745 ],
[0.5012804 ]], dtype=float32),
'mean': Array([[ 0.30212572, 0.67478853],
[-0.963459 , 0.086253 ],
[ 0.39044896, -2.2378268 ],
...,
[ 1.3652769 , 0.6302657 ],
[ 2.7543025 , -1.9100804 ],
[-0.16545922, 0.6475435 ]], dtype=float32)}}
We then fit the model using the typical flow matching loss.
[15]:
params, info = model.fit(
jr.PRNGKey(2),
data
)
27%|██████████████████████████████ | 273/1000 [03:19<08:52, 1.37it/s]
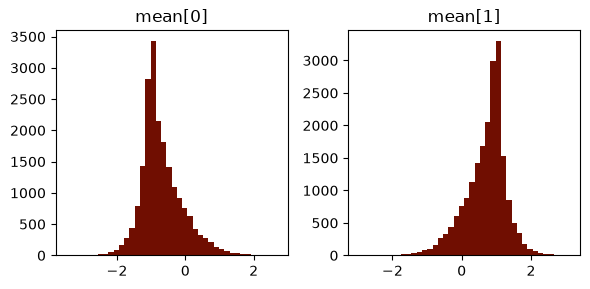
Finally, we sample from the posterior distribution for a specific observation \(y_{\text{obs}}\).
[16]:
y_obs = jnp.array([-1.0, 1.0])
samples, _ = model.sample(
jr.PRNGKey(3), params, y_obs, n_chains=4, n_samples=10_000, n_warmup=5_000
)
Model diagnostics and visualization#
Sbijax provides basic functionality to analyse posterior draws. We show some visualizations below.
[17]:
plot_posterior_hist(samples, "mean")
plt.show()
[18]:
plt.plot(info.losses[1:])
plt.xlabel("step")
plt.ylabel("loss")
plt.show()

[19]:
print("ESS:", sbijax.ess(samples))
print("R-hat:", sbijax.rhat(samples))
ESS: {'mean': Array([20649.303, 18767.834], dtype=float32), 'scale': Array(20291.781, dtype=float32)}
R-hat: {'mean': Array([1.0000986, 1.0001243], dtype=float32), 'scale': Array(1.0015361, dtype=float32)}
Sequential inference#
sbijax supports sequential (multi-round) training through the standalone run_sequential driver. It simulates from the current posterior each round, appends to the dataset, and refits, so the estimator itself stays single-round and stateless.
[ ]:
from sbijax import run_sequential
params, info = run_sequential(
jr.PRNGKey(1),
model,
prior,
simulator_fn,
y_obs,
n_rounds=2,
n_simulations_per_round=2_000,
)
_ , _ = model.sample(jr.PRNGKey(3), params, y_obs)
29%|████████████████████████████████▎ | 294/1000 [01:51<04:28, 2.63it/s]
2%|█▊ | 16/1000 [00:08<08:55, 1.84it/s]
Session info#
[ ]:
import session_info
session_info.show(html=False)